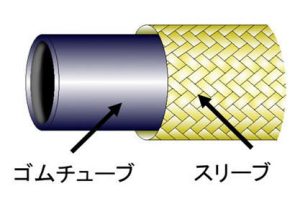
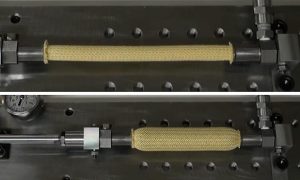
図1 マッキベン型人工筋肉の構造 図2 開発した「油圧ハイパワー人工筋肉」の動作例
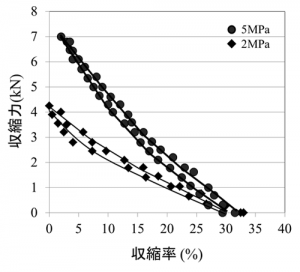
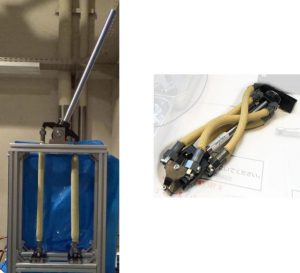
図3 開発した人工筋肉の特性 図4 ロボットアームへの応用例
内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所諭)の一環として、東京工業大学 鈴森康一教授とブリヂストン 櫻井良フェローらの研究チームは、極限の災害現場で活躍可能なタフなロボット実現のカギの一つである油圧駆動のハイパワー人工筋肉の開発に成功した。
今回開発した人工筋肉は材料にゴムチューブを用いることにより軽量かつ衝撃や振動に強く、大きな力を出すことができます。この人工筋肉を用いることで、コンパクトで省エネ型のタフなロボットの実現が可能になるという。また、将来的には、今までにない小型軽量で高出力の産業用・家庭用ロボットへの展開も期待されるそうだ。
東京工業大学とブリヂストンは、大きな力を出すことができ、かつ作業に応じて柔らかく動くことも可能な人間の筋肉に着目し、それを人工的に再現することを試みてきた。さらに人間では出し得ないような高い出力を目指すアプローチにより、平成26年度より共同して「ハイパワー人工筋肉」の研究開発を進めてきた。
この人工筋肉は、ゴムチューブと高張力繊維から構成され、油圧で動作する。ゴムチューブと高張力繊維によりなめらかな動きを実現するとともに、油圧での動作を可能とすることで高い「力/自重比」、高い耐衝撃性/振動性、さらに、作業に応じて柔らかい動作も可能、といった特徴を有しているという。
外部からの衝撃や振動に対して頑強で、大きな力作業が行え、必要に応じて微妙な力の制御が必要な作業も丁寧にこなすことができる、従来に比べて格段に「タフな」ロボット実現に新しい道を拓くものだという。
ポイント
・「軽くて強い力」– 超軽量、ハイパワー(従来の電気モーターや油圧シリンダに比べ約5~10倍の大きな「力/自重比」)。
・「丈夫で壊れにくい」 — 高耐久性・高耐油性ゴムによる高い耐衝撃性と耐振動性を実現。
・「優しくて力持ち」 — 大きな力も細かな力も多彩な作業や制御が可能。産業用および家庭用ロボット等幅広い用途への発展も期待される。
.